
主演列表
剧情简介
作者 | 楚欣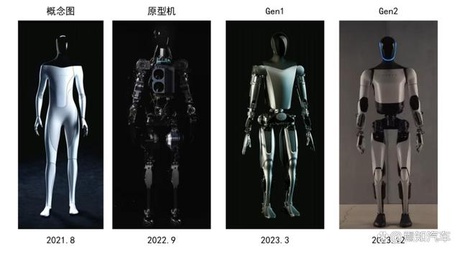 出品 | 焉知
出品 | 焉知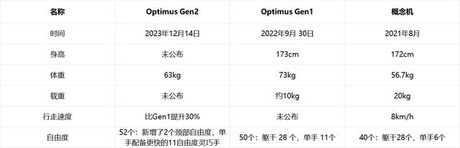 圈子 | 加微yanzhi-2020,进人形机器人社群
圈子 | 加微yanzhi-2020,进人形机器人社群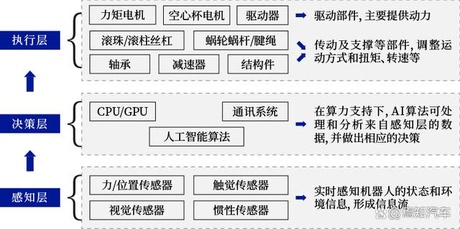 2021年8月,首届特斯拉AI DAY上,马斯克首次公开机器人项目,公开展示概念机Tesla Bot;
2021年8月,首届特斯拉AI DAY上,马斯克首次公开机器人项目,公开展示概念机Tesla Bot;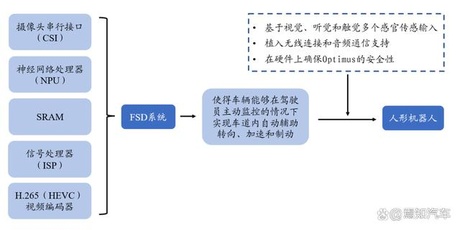 2022年2月,Tesla Bot 从概念走向现实,推出人形机器人原型机,将其作为开发平台进行深度研发;
2022年2月,Tesla Bot 从概念走向现实,推出人形机器人原型机,将其作为开发平台进行深度研发;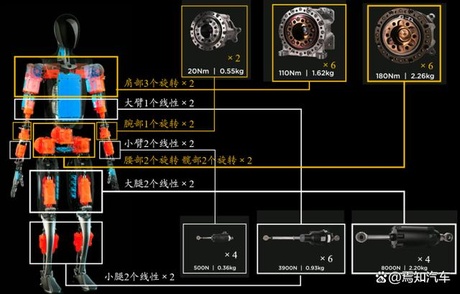 2022年4月,原型机完成第一次步态行走;
2022年4月,原型机完成第一次步态行走; 2022年9月,第二届特斯拉AI DAY上,Optimus首次亮相,演示了直立行走、搬运、洒水等动作; 2023年2月,Investor Day上,Optimus通过视频展示了其能够自由行走、拧螺丝等简单的工作; 2023年5月,股东大会上,马斯克现场展示了Optimus 行走、挥手、摇摆等动作,分享了其在汽车工厂搬运、移动金属零件的视频,体现了一定程度的FSD算法复用; 2023年9月,特斯拉通过社交平台发布了Optimus的进化视频,对外展示了自我校准、学习处理多任务、姿态控制和自平衡能力提升等; 2023年12月,Optimus Gen-2视频发布,Gen-2实现了更为灵活的行走,实现了二指拿鸡蛋、左右手的转移等更为精细化的动作,展示了强大的运动和质心控制能力。 一、各代性能参数 特斯拉依托自身汽车制造的基础上,两年多的时间就实现了多次迭代:概念机~原型机~Optimus Gen 1~Optimus Gen2,进展可谓非常迅速。根据公开信息,Optimus相关的性能参数如下: 二、Optimus软硬件 Optimus主要的零部件有感知系统、决策系统、运控系统。感知系统主要有视觉感知、力觉感知;决策系统则是依托自研Soc芯片,采用BEV+变压器+占用网络的方案;运控系统则是以执行器为核心,负责驱动机器人执行运动。 1、感知系统 Optimus基本采用了 Tesla 电动车相同设备,包括其自主研发的芯片集成系统作为“大脑”,以及三颗 Autopilot 级别摄像头。同时,在手指搭载了具备感知功能的传感器,可以自适应进行抓取。 视觉感知:Optimus采用了纯视觉方案,共配置有3颗摄像头,左右眼各一个2D摄像机,外加一颗广角的鱼眼比较,均基于Autopilot技术。这些摄像头的组合可提供广阔的视野范围、清晰画面和快速传输。相较于其他人形机器人产品通常采用主动视觉感知方案,特斯拉选择了被动视觉感知方案,主要因为特斯拉的FSD(全自动驾驶)软件算法较强,不需要使用硬件较强的主动视觉,从而降低了硬件成本。 另外,对于复杂对象识别和尺寸测量精度增加的要求也催生了 3D 视觉的增长,人形机器人有望提升多目视觉、激光雷达等3D视觉技术的需求。 力觉感知:在力觉感知方面,各执行器使用了力或力矩传感器(内部传感器),而Gen2在手部和脚底新增了触觉传感器,脚踝和手腕处增加了多维力传感器。Gen2手指增加了触觉传感器,手腕增加了多维力传感器,以提升手部的灵活性和对复杂物体的操作能力。Gen2足部分为脚趾和脚掌两个部分,其中脚掌增加了触觉(压力)传感器,脚踝安装了多维力传感器,用于检测脚部所受的作用力,以在不平衡地面上维持平衡。 自主导航:特斯拉通过汽车自动驾驶技术的迁移快速掌握人形机器人自主导航定位功能,机器人依托于建图结果,或与建图过程同时对自身方位进行准确辨识,通过其自主决策、规划与控制,从而使机器人可以与环境更好地互动,例如在低电量的时候能够自主去充电。 2、决策系统 主控芯片:Optimus主控芯片采用了特斯拉自研Soc(System on Chip)芯片,参照当前HW3(Hardware 3.0)驾驶辅助系统的算力,Optimus算力为72Tops。该Soc芯片支持 Wifi、LTE 以及音频功能,具备硬件级别安全功能。 AI训练芯片:采用了特斯拉 Dojo D1 超级计算机芯片,每个 D1 单元之间无缝连接,相邻芯片之间的延迟低,训练模块实现了更大程度的带宽保留,实现了高达 9 千万亿次的算力。理论上讲,Dojo 超级计算机的性能无上限,实际应用中,与业内其他产品相比同成本下性能提高 4 倍,同能耗、性能提高1.3 倍,占用空间降低 5 倍。 虽然Optimus采用了与特斯拉电动车相同的FSD系统,但是考虑到彼此需求还是存在一定的差异,特斯拉对植入人形机器人的 FSD 系统做了三方面的改变: 信息基于多感官输入:为使 Optimus 的“大脑”更接近人脑,信息 将基于多个感官传感输入(视觉、听觉和触觉),让机器人能够处理数据并做出决策; 植入无线连接和音频通信支持:为了方便机器人与人的沟通交流,特斯拉在 FSD 系统中植入无线连接和音频通讯支持功能; 增加硬件保护机制:为稳定机器人的四肢控制,保护机器人本身和机器人周围的人,将在硬件上确保 Optimus 的安全性。 特斯拉将 FSD 系统应用于人形机器人,并做出适应性修改数据来源:特斯拉 AI Day 软件及算法:Optimus 采用了与汽车上的 FSD 方案相同的占用网络模型(Occupancy Network)来对三维环境进行建模。占用网络模型以摄像头采集的视频帧作为输入,通过算法生成周围环境网格化的占用模型,并且能够根据当前占用模型预测未来某处环境是否会被占用;占用网络模型还能够识别运动中的物体如汽车、行人等,辅助车辆提前进行避让操作。在Optimus的演示中里,其识别和决策系统与自动操作算法如出一惯。 此外,特斯拉使用运动规划算法辅助 Optimus 实现平衡控制与移动。对于人形机器人来说,双足站立和移动过程中的平衡控制是其能否良好应用于现实生活的关键。实现移动状态下的平衡控制是非常困难的,Tesla 团队通过半年的优化实现了 Optimus 的平衡行走。在平衡行走的基础上,Tesla 采用了运动捕捉的方式,通过对人的演示如抓取、搬运等动作的捕捉,将其关键节点如手、肘部等的运动轨迹映射到机器人上,通过大量的动作捕捉形成训练库。通过优化算法,在训练库动作的基础上,对实际机器人的运动轨迹进行优化,实现了 Optimus 模拟人类动作,并能够适应更加复杂的运动场景。 3、执行系统 人形机器人负责执行的主要硬件有执行器和灵巧手。执行器是一种驱动机制,控制系统通过它来执行或操作任务,可以简单类比为人体的肌肉和四肢,大脑会通过控制肌肉和四肢来实现运动。执行器一般分为两种:线性执行器、旋转执行器。灵巧手方面,特斯拉通过仿生技术全面看齐人手,结构上要求手部灵活且有较高的抓取力,从而需要搭配体积小灵活度高,但能量密度大的执行器,可实现细微操作。 线性执行器:特斯拉 Optimus 线性执行器的配置为:无框力矩电机+行星滚柱丝杠+力传感器+编码器+驱动器+球轴承+四点接触球轴承。 1)电机:使用特斯拉自主研发的永磁电机。2)丝杠:使用反向式行星滚柱丝杠,具有较强刚性。3)编码器:使用一个位置传感器。4)力传感器:由于丝杠没有反驱性,配置力 传感器。5)轴承:使用深沟球轴承、四点接触球轴承。 旋转执行器:特斯拉 Optimus 旋转执行器的配置为:无框力矩电机+谐波减速器+力矩传感器+双编码器+驱动器+交叉滚子轴承+角接触球轴承。 1)电机:使用特斯拉自主研发的永磁电机。2)减速器:使用谐波减速器,结构简单,减速比大,传动精度和传动效率较高。3)位置传感器:使用两个,即双编码器,包括输入位置编码器、输出位置编码器。4)力传感器:使用一个非接触式扭矩传感器。5)轴承:使用角接触轴承、交叉滚子轴承。 灵巧手:特斯拉 Optimus Gen1灵巧手单手配置为:执行 6 个空心杯关节+传动 5 个蜗轮蜗杆/绳驱+若干个传感器。特斯拉 Optimus 每只灵巧手使用了 6 只空心杯关节,在灵巧手中相应的传动配置是:空心杯关节+蜗轮蜗杆+绳传动,在空心杯关节之后引入了一级蜗轮蜗杆:一方面是针对线传动做旋转方向的转换,另一方面是利用蜗轮蜗杆的自锁特性去提升灵巧手的负载(自锁)能力。在空心杯关节内,空心杯电机具备高速低扭矩的特点,一般要配合减速箱以实现较小空间获得较大手指抓握力,此外还包括编码器和驱动器等。此外,灵巧手是末端感知和执行的关键部位,预计触觉和力等类型的传感器将大量使用。 特斯拉 Optimus 手部特征 4、动力系统 Optimus 使用的是特斯拉自研的电池,在躯干处搭载,电池组容量为 2.3 kWh、52V ,能够维持机器人一整天的工作。电池组借鉴了特斯拉电子产品和汽车产品中高度集成的设计,搭载至特斯拉 SoC 系统运行。SoC 系统指的是将一套完整的信息处理系统集成到一块芯片上,电池组中的单块芯片可支持所有传感融合、电池通讯以及充放电管理功能。此外,冷却系统特斯拉采用高度集成充电管理,复用汽车电池的能量管理系统。 三、总结展望 不管是B端还是C端,对机器人都有大量的刚性需求,目前已经实现量产的机器人基本也都有相对明确的使用场景,如工厂的搬运机器人、餐厅的点餐/传菜机器人等。现阶段,人形机器人企业正在积极探索刚需的大规模应用场景,如优必选在探索智能物流、智慧康养等领域,特斯拉也明确其人形机器人初期的大规模应用场景为其工厂内的搬运和上下料等工作。人形机器人如何在技术革新、完善的同时,如何进行大规模的商业化落地,我们将持续关注。 在 2023 特斯拉股东大会上,马斯克曾对人形机器人做出乐观的预测:“如果按照人和机器人的数量为 2:1 比例的话,机器人的需求会远远超过车,特斯拉的长期价值,其大部分价值将是擎天柱。” 人形机器人的未来充满了无限的可能性,它们的发展将深刻地影响我们的社会、经济、文化乃至我们自身的存在。面对这一挑战,我们需要的不仅是技术的智慧,更需要人文的关怀和伦理的思考。让我们携手迎接这一变革,共同创造一个和谐、进步的未来。 参考资料: 1.特斯拉 Optimus 引领技术实现,国产零部件迎来机遇,浙商证券; 2.特斯拉 Optimus 亮点及未来进步点并存,建议关注核心零部件环节,东吴证券; 3.Optimus 正式发布,人形机器人开启新时代
2022年9月,第二届特斯拉AI DAY上,Optimus首次亮相,演示了直立行走、搬运、洒水等动作; 2023年2月,Investor Day上,Optimus通过视频展示了其能够自由行走、拧螺丝等简单的工作; 2023年5月,股东大会上,马斯克现场展示了Optimus 行走、挥手、摇摆等动作,分享了其在汽车工厂搬运、移动金属零件的视频,体现了一定程度的FSD算法复用; 2023年9月,特斯拉通过社交平台发布了Optimus的进化视频,对外展示了自我校准、学习处理多任务、姿态控制和自平衡能力提升等; 2023年12月,Optimus Gen-2视频发布,Gen-2实现了更为灵活的行走,实现了二指拿鸡蛋、左右手的转移等更为精细化的动作,展示了强大的运动和质心控制能力。 一、各代性能参数 特斯拉依托自身汽车制造的基础上,两年多的时间就实现了多次迭代:概念机~原型机~Optimus Gen 1~Optimus Gen2,进展可谓非常迅速。根据公开信息,Optimus相关的性能参数如下: 二、Optimus软硬件 Optimus主要的零部件有感知系统、决策系统、运控系统。感知系统主要有视觉感知、力觉感知;决策系统则是依托自研Soc芯片,采用BEV+变压器+占用网络的方案;运控系统则是以执行器为核心,负责驱动机器人执行运动。 1、感知系统 Optimus基本采用了 Tesla 电动车相同设备,包括其自主研发的芯片集成系统作为“大脑”,以及三颗 Autopilot 级别摄像头。同时,在手指搭载了具备感知功能的传感器,可以自适应进行抓取。 视觉感知:Optimus采用了纯视觉方案,共配置有3颗摄像头,左右眼各一个2D摄像机,外加一颗广角的鱼眼比较,均基于Autopilot技术。这些摄像头的组合可提供广阔的视野范围、清晰画面和快速传输。相较于其他人形机器人产品通常采用主动视觉感知方案,特斯拉选择了被动视觉感知方案,主要因为特斯拉的FSD(全自动驾驶)软件算法较强,不需要使用硬件较强的主动视觉,从而降低了硬件成本。 另外,对于复杂对象识别和尺寸测量精度增加的要求也催生了 3D 视觉的增长,人形机器人有望提升多目视觉、激光雷达等3D视觉技术的需求。 力觉感知:在力觉感知方面,各执行器使用了力或力矩传感器(内部传感器),而Gen2在手部和脚底新增了触觉传感器,脚踝和手腕处增加了多维力传感器。Gen2手指增加了触觉传感器,手腕增加了多维力传感器,以提升手部的灵活性和对复杂物体的操作能力。Gen2足部分为脚趾和脚掌两个部分,其中脚掌增加了触觉(压力)传感器,脚踝安装了多维力传感器,用于检测脚部所受的作用力,以在不平衡地面上维持平衡。 自主导航:特斯拉通过汽车自动驾驶技术的迁移快速掌握人形机器人自主导航定位功能,机器人依托于建图结果,或与建图过程同时对自身方位进行准确辨识,通过其自主决策、规划与控制,从而使机器人可以与环境更好地互动,例如在低电量的时候能够自主去充电。 2、决策系统 主控芯片:Optimus主控芯片采用了特斯拉自研Soc(System on Chip)芯片,参照当前HW3(Hardware 3.0)驾驶辅助系统的算力,Optimus算力为72Tops。该Soc芯片支持 Wifi、LTE 以及音频功能,具备硬件级别安全功能。 AI训练芯片:采用了特斯拉 Dojo D1 超级计算机芯片,每个 D1 单元之间无缝连接,相邻芯片之间的延迟低,训练模块实现了更大程度的带宽保留,实现了高达 9 千万亿次的算力。理论上讲,Dojo 超级计算机的性能无上限,实际应用中,与业内其他产品相比同成本下性能提高 4 倍,同能耗、性能提高1.3 倍,占用空间降低 5 倍。 虽然Optimus采用了与特斯拉电动车相同的FSD系统,但是考虑到彼此需求还是存在一定的差异,特斯拉对植入人形机器人的 FSD 系统做了三方面的改变: 信息基于多感官输入:为使 Optimus 的“大脑”更接近人脑,信息 将基于多个感官传感输入(视觉、听觉和触觉),让机器人能够处理数据并做出决策; 植入无线连接和音频通信支持:为了方便机器人与人的沟通交流,特斯拉在 FSD 系统中植入无线连接和音频通讯支持功能; 增加硬件保护机制:为稳定机器人的四肢控制,保护机器人本身和机器人周围的人,将在硬件上确保 Optimus 的安全性。 特斯拉将 FSD 系统应用于人形机器人,并做出适应性修改数据来源:特斯拉 AI Day 软件及算法:Optimus 采用了与汽车上的 FSD 方案相同的占用网络模型(Occupancy Network)来对三维环境进行建模。占用网络模型以摄像头采集的视频帧作为输入,通过算法生成周围环境网格化的占用模型,并且能够根据当前占用模型预测未来某处环境是否会被占用;占用网络模型还能够识别运动中的物体如汽车、行人等,辅助车辆提前进行避让操作。在Optimus的演示中里,其识别和决策系统与自动操作算法如出一惯。 此外,特斯拉使用运动规划算法辅助 Optimus 实现平衡控制与移动。对于人形机器人来说,双足站立和移动过程中的平衡控制是其能否良好应用于现实生活的关键。实现移动状态下的平衡控制是非常困难的,Tesla 团队通过半年的优化实现了 Optimus 的平衡行走。在平衡行走的基础上,Tesla 采用了运动捕捉的方式,通过对人的演示如抓取、搬运等动作的捕捉,将其关键节点如手、肘部等的运动轨迹映射到机器人上,通过大量的动作捕捉形成训练库。通过优化算法,在训练库动作的基础上,对实际机器人的运动轨迹进行优化,实现了 Optimus 模拟人类动作,并能够适应更加复杂的运动场景。 3、执行系统 人形机器人负责执行的主要硬件有执行器和灵巧手。执行器是一种驱动机制,控制系统通过它来执行或操作任务,可以简单类比为人体的肌肉和四肢,大脑会通过控制肌肉和四肢来实现运动。执行器一般分为两种:线性执行器、旋转执行器。灵巧手方面,特斯拉通过仿生技术全面看齐人手,结构上要求手部灵活且有较高的抓取力,从而需要搭配体积小灵活度高,但能量密度大的执行器,可实现细微操作。 线性执行器:特斯拉 Optimus 线性执行器的配置为:无框力矩电机+行星滚柱丝杠+力传感器+编码器+驱动器+球轴承+四点接触球轴承。 1)电机:使用特斯拉自主研发的永磁电机。2)丝杠:使用反向式行星滚柱丝杠,具有较强刚性。3)编码器:使用一个位置传感器。4)力传感器:由于丝杠没有反驱性,配置力 传感器。5)轴承:使用深沟球轴承、四点接触球轴承。 旋转执行器:特斯拉 Optimus 旋转执行器的配置为:无框力矩电机+谐波减速器+力矩传感器+双编码器+驱动器+交叉滚子轴承+角接触球轴承。 1)电机:使用特斯拉自主研发的永磁电机。2)减速器:使用谐波减速器,结构简单,减速比大,传动精度和传动效率较高。3)位置传感器:使用两个,即双编码器,包括输入位置编码器、输出位置编码器。4)力传感器:使用一个非接触式扭矩传感器。5)轴承:使用角接触轴承、交叉滚子轴承。 灵巧手:特斯拉 Optimus Gen1灵巧手单手配置为:执行 6 个空心杯关节+传动 5 个蜗轮蜗杆/绳驱+若干个传感器。特斯拉 Optimus 每只灵巧手使用了 6 只空心杯关节,在灵巧手中相应的传动配置是:空心杯关节+蜗轮蜗杆+绳传动,在空心杯关节之后引入了一级蜗轮蜗杆:一方面是针对线传动做旋转方向的转换,另一方面是利用蜗轮蜗杆的自锁特性去提升灵巧手的负载(自锁)能力。在空心杯关节内,空心杯电机具备高速低扭矩的特点,一般要配合减速箱以实现较小空间获得较大手指抓握力,此外还包括编码器和驱动器等。此外,灵巧手是末端感知和执行的关键部位,预计触觉和力等类型的传感器将大量使用。 特斯拉 Optimus 手部特征 4、动力系统 Optimus 使用的是特斯拉自研的电池,在躯干处搭载,电池组容量为 2.3 kWh、52V ,能够维持机器人一整天的工作。电池组借鉴了特斯拉电子产品和汽车产品中高度集成的设计,搭载至特斯拉 SoC 系统运行。SoC 系统指的是将一套完整的信息处理系统集成到一块芯片上,电池组中的单块芯片可支持所有传感融合、电池通讯以及充放电管理功能。此外,冷却系统特斯拉采用高度集成充电管理,复用汽车电池的能量管理系统。 三、总结展望 不管是B端还是C端,对机器人都有大量的刚性需求,目前已经实现量产的机器人基本也都有相对明确的使用场景,如工厂的搬运机器人、餐厅的点餐/传菜机器人等。现阶段,人形机器人企业正在积极探索刚需的大规模应用场景,如优必选在探索智能物流、智慧康养等领域,特斯拉也明确其人形机器人初期的大规模应用场景为其工厂内的搬运和上下料等工作。人形机器人如何在技术革新、完善的同时,如何进行大规模的商业化落地,我们将持续关注。 在 2023 特斯拉股东大会上,马斯克曾对人形机器人做出乐观的预测:“如果按照人和机器人的数量为 2:1 比例的话,机器人的需求会远远超过车,特斯拉的长期价值,其大部分价值将是擎天柱。” 人形机器人的未来充满了无限的可能性,它们的发展将深刻地影响我们的社会、经济、文化乃至我们自身的存在。面对这一挑战,我们需要的不仅是技术的智慧,更需要人文的关怀和伦理的思考。让我们携手迎接这一变革,共同创造一个和谐、进步的未来。 参考资料: 1.特斯拉 Optimus 引领技术实现,国产零部件迎来机遇,浙商证券; 2.特斯拉 Optimus 亮点及未来进步点并存,建议关注核心零部件环节,东吴证券; 3.Optimus 正式发布,人形机器人开启新时代